虚假警报率与虚假警报的概率之间的关系
2021年8月24日
虚假警报率与虚假警报的概率之间的关系
2021年8月24日
小乔治·威廉姆斯(George M. Williams)亚博棋牌游戏,Allegro Microsystems
介绍
讨论了根据错误警报率(FAR)计算出的错误警报概率之间的关系,以及与LIDAR系统测量目标距离相关的检测概率。
偏见的错误警报的可能性
在飞行时间(TOF)激光痛系统中,传感器和目标之间激光脉冲的行进时间用于估计目标范围。在TOF的范围估计方法中,短激光脉冲会传输,然后从目标反射。激光脉冲传输和反向散射脉冲的接收时间由一个或多个光压剂测量。将TOF计算为脉冲传输和接收之间的时间,而到目标(R)的范围是根据激光脉冲的平均组速度(c)的函数,沿着大气条件沿着路径之间的路径。传感器和目标,基于关系:
等式1:
r = t的/2×c。
实际上,应用程序需求在确定LIDAR系统的最大范围方面起着重要作用。LiDAR系统可以为最大距离提供有用的测量,其中检测目标的概率(Pd)保持大于应用程序要求确定的一些值(通常指定在50%至99%之间)。在没有特定应用的情况下,Pd普遍具有挑战性,因为Pd取决于许多目标特性 - 范围,镜面和漫射反射率,大小,方向和地形以及中间大气特性。
配置LIDAR系统时,Pd通常相对于错误警报的概率指定(PF A)。pF A是,每个范围事件至少在固定距离时至少发生一次错误警报的概率。实际上,对于固定范围,这是通过将脉冲检测阈值提高到所得P的水平来完成的F A处于或略低于所需的性能值。在该阈值下,可以测量超过电压阈值所需的光脉冲信号功率d。
但是,对于现实世界中的问题,PF A不是很有用,因为它仅与一个特定范围的目标测量相关。目标并不总是相同的距离,PF A随着飞行时间到各种范围的这些目标的持续时间的变化。而且,PF A取决于背景太阳条件和环境温度,因此直接测量PF A是一个很快对于实际应用而变得太笨拙的过程。
使用错误的警报率指定LiDAR系统的性能的好处在于,很容易且很容易测量。
为了衡量,错误的警报(从电子噪声或太阳背景中归纳)在一个时间单位内计数(即每秒错误计数)。在给定的脉冲检测阈值下,每秒的虚假警报的平均数量。
虚假警报在时间上均匀分布并遵守泊松统计。错误警报数量随范围的函数的期望值计算为:
等式2:
⟨fa⟩= far×(2r) / c。
当⟨fa⟩比一个小得多时,错误警报计数的期望值也是错误警报的概率,pF A。当⟨fa⟩较大时,就像低检测阈值和远程目标一样,泊松统计的概率至少发生了一个错误警报如下:
等式3:
pF A= 1 - EXP [ - ⟨FA⟩]。
可以为任何最大允许的P指定最大允许的远处F A要求使用:
等式4:
far = –ln(1 - PF A)×c /(2 r)≈pF A×c /(2 r),
近似值如果⟨fa⟩很小,则有效。
pF A在图1中,对等效物的绘制是各种FARS的目标范围的函数,并且是图2中各个目标范围的远方函数F A图3中的值,作为p的函数F A对于图4中的各种目标范围。
结论
这里介绍的地块表明:
- 1%PFA需要远距离阈值:
- 1,000 Hz的目标为1,500米;和
- 5,000米的目标250 Hz。
- 0.1%PFA需要远距离阈值:
- 1,500米的目标100 Hz;和
- 5,000米的目标3 Hz
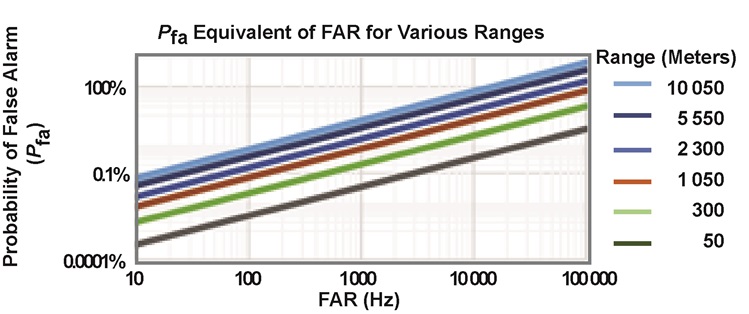
图1:PF A各种范围的各种远值的等效物。

图2:PF A各种范围的各个范围的等效物。

图3:各种P的远值F A值,在各个范围内指定。
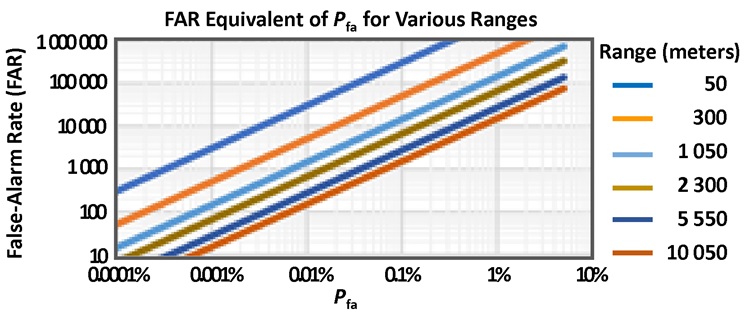
图4:各种p的差距F A各种范围的值。