NEP作为激光雷达APD光接收机性能指标的局限性
2021年8月24日
NEP作为激光雷达APD光接收机性能指标的局限性
2021年8月24日
作者:安德鲁·亨廷顿博士;George M. Williams, Jr., 亚博棋牌游戏Allegro MicroSystems
简介
噪声等效功率(NEP)常用来表示光接收放大器输出电压噪声的等效光信号电平。然而,同一NEP的雪崩光电二极管(APD)接收器在噪声的振幅分布方面可能存在很大差异,从而导致消除虚假警报所需的检测阈值发生很大变化。因此,NEP本身并不能很好地衡量采用APD的激光雷达接收机的灵敏度。对于达到指定假报警率的检测阈值,实现指定检测概率所需的光信号被证明是用于激光雷达应用的APD光接收机性能的更可靠表征。亚博尊贵会员
噪声等效功率和噪声等效输入
光接收机的噪声等效功率(NEP)可以是一个信息度量,但使用NEP来评估激光雷达接收机性能存在APD接收机的NEP不能完全描述其接收机工作特性(ROC)的限制。激光雷达接收机的ROC是接收机脉冲探测概率(Pd)相对于其假阳性率(假阳性率可由接收器的假报警率(FAR)决定);两者都随激光雷达脉冲检测电路的检测门限的函数而变化。对于非APD接收器,NEP唯一地表征了FAR的趋势和阈值,但具有相同NEP的两个APD接收器可能具有显著不同的FAR特征。
NEP和噪声等效输入(NEI)通常用于用等效光信号电平来表示光接收放大器输出端的电压噪声,如果在探测器输入端出现等效光信号电平,将导致输出电压波动的幅度与噪声相同。虽然NEP (W)和NEI(光子)可以定义为量化信噪比为单位的信号电平,但这些指标更通常用于量化黑暗条件下的噪声,没有信号射击噪声。
基于apd的激光雷达光接收机框图如图1所示,其中输出电压噪声(Vn)为跨阻放大器输出电位的标准偏差(V出)在黑暗条件下。

图1:基于apd的激光雷达光接收机框图。
V的偏转出对脉冲光信号的响应可以写成:
方程1:

方程2:

其中Vs是脉冲光信号产生的峰值输出电压,Ps是信号的峰值瞬时光功率,单位为瓦,Vd为无信号时的输出电压,N年代为信号脉冲的总光子计数,QE为APD的量子效率,M为APD的平均雪崩增益,λ为信号波长,单位为微米,q为基本电荷,单位为库仑,h为普朗克常数,单位为J·s, c为光速,单位为M /s, Ω蒂雅为Ω中放大器的安培-伏跨阻,G蒂雅为V/e-模式下放大器的电子到伏特转换增益。噪声等效信号可以写成:
方程3:

方程4:

一般来说,Ω蒂雅和G蒂雅取决于信号脉冲形状,因此NEP和NEI是特定于暗噪声所涉及的信号。正如NEP将输出电压噪声指瞬时信号功率,NEI将输出电压噪声指总光子计数一样,输出电压噪声本身可以被建模为APD的瞬时暗电流或暗电流在有效积分时间内传递的累积电荷:
方程5:

方程6:

其中BW是接收机模拟信号链进入其比较器的带宽,单位为Hz;年代I_TIA是放大器输入参考噪声的频谱强度在其带宽上的平均值,表示为:
方程7:

F为电离率比k的APD的多余噪声因子,表示为F = k M + (1 - k) (2 - 1/M);我d为直流暗电流的乘积,单位为安培;我b为背景光电流,单位为安培;噪音蒂雅是以电子为单位的放大器输入参考噪声,表示为:
方程8:
和τeff有效积分时间,以秒为单位。
在大多数激光雷达接收机使用情况下,脉冲检测阈值被调整以消除虚假警报,直到达到允许的FAR(例如60 Hz);然后,激光雷达的灵敏度表示在该FAR为信号电平时,脉冲探测概率(Pd)的某一期望值(如Pd= 95%)。脉冲频率要求决定了脉冲检测门限,脉冲检测门限决定了脉冲检测概率。分析FAR和脉冲探测概率需要V的统计分布出, NEP或NEI没有充分概括这一点。
接近接收机指标的限制-高斯分布是不够的
通常将Vout的概率分布近似为规范化的高斯分布(图2)。
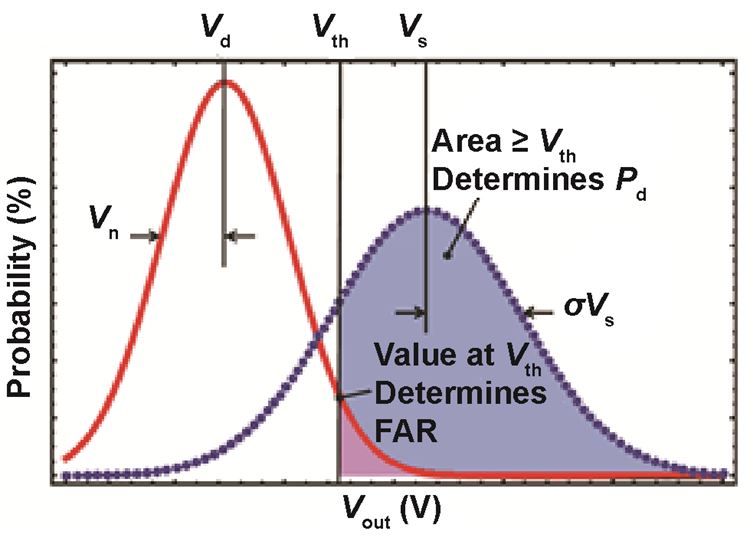
图2:V出对于有(虚线曲线)和没有(实线曲线)光信号返回的情况。
暗条件下表征输出分布的均值和标准差分别为Vd和Vn当有信号时,则为V年代和σV年代.公式5和公式6给出了接收机的暗噪声(Vn);V的标准差出当一个信号出现时,可以写成:
方程9:

方程10:

在公式9中,信号拍摄噪声被视为峰值光电流是直流的,这只是持续时间长于APD响应时间的矩形信号脉冲的一个很好的近似。平均光响应(V年代)是V的和d电压步长(ΔV年代)由式(1)和式(2)给出。
高斯近似通常足够精确,可以使用在某些检测阈值电压下评估的互补累积分布函数(CCDF)来计算脉冲检测概率:
方程11:

在Vth为脉冲检测阈值,相对于Vd,允许V年代将改为ΔV年代.
对于以较大电离率比(k)为特征的APD组装的光接收机,高斯分布并不是一个充分的近似来计算FAR。APD光接收机通常操作的检测阈值设置得足够高,以消除100万数量级的假警报,因此FAR对假警报-振幅分布的详细形状敏感,这些假警报-振幅分布比平均振幅高出许多标准差。V的真实分布出暗条件下的卷积为泊松加权McIntyre分布,表示APD乘以暗电流(P美国)和表示放大器输入参考噪声的高斯分布(P蒂雅):
方程12:

P处方(n出)是测量V的概率出= G蒂雅×n出,和n出达到V所需的等效信号电子数是多少出.
APD光接收器FAR是V的时间概率密度出处于脉冲检测阈值,斜率为正:
方程13:

其中,转换增益(G蒂雅)用来表示Vn和Vth作为等效输入电子计数,nn和nth.
NEP和FAR都依赖于输出电压噪声,但NEP本身并不能决定FAR。FAR对V分布的依赖关系出,式12中用P表示处方(n出),使FAR对k和M敏感,这样k和M的组合可以产生相同的NEP,从而产生不同的FAR值。
理解Far及其与其他指标的关系
FAR与k、M和NEP的关系最好通过例子来证明。例如,表1中描述了三个具有相同NEP的光接收器,其中接收器1比接收器2和接收器3具有更大的电离率比(k = 0.2 vs. k = 0.02)。因此,接收机1具有更大的过量噪声因子(F = 5.6 vs. M = 20时F = 2.3)。为了匹配接收器1的NEP,尽管k较低,接收器2以较低的雪崩增益运行,接收器3被分配较高的初级(未相乘)暗电流。
表1中描述的每个接收器的FAR特征在图3中与检测阈值对应。激光雷达灵敏度定义为达到指定脉冲探测概率和FAR的平均信号电平,图4比较了FAR在1至150 Hz范围内和95%脉冲探测概率的情况。虽然这三种接收器配置的特点是相同的NEP,但它们在灵敏度上有所不同。因此,NEP本身并不能很好地衡量激光雷达接收机的灵敏度。
表1:具有相同NEP的三个示例激光雷达系统的特征
| 参数 | 接收器1 | 接收器2 | 接收机3 |
| TIA带宽(BW) | 100兆赫 | ||
| TIA输入噪声(噪声蒂雅) | 400 e- | ||
| TIA输入噪声谱强度 | 1.64 x10-24年一个2/赫兹 | ||
| 积分时间(τeff) | 5 ns | ||
| TIA转换增益(G蒂雅) | 32μV / e- | ||
| TIA跨阻(Ω蒂雅) | 1米Ω | ||
| APD电离率比(k) | 0.2 | 0.02 | 0.02 |
| APD增益(M) | 20. | 13 | 20. |
| 过量噪音系数(F) | 5.6 | 2.1 | 2.3 |
| 主APD暗电流(Id/米) | 5 nA | 5 nA | 12 nA |
| 量子效率(QE) | 80% | 80% | 80% |
| nn | 712 e- | 465 e- | 712 e- |
| NEI | 44.5 光子 |
44.7 光子 |
44.5 光子 |
| NEP (λ =1.55 μm) | 1.1西北 | 1.1西北 | 1.1西北 |

图3:表1中三个接收器的FAR与检测阈值,它们都具有相同的NEP。
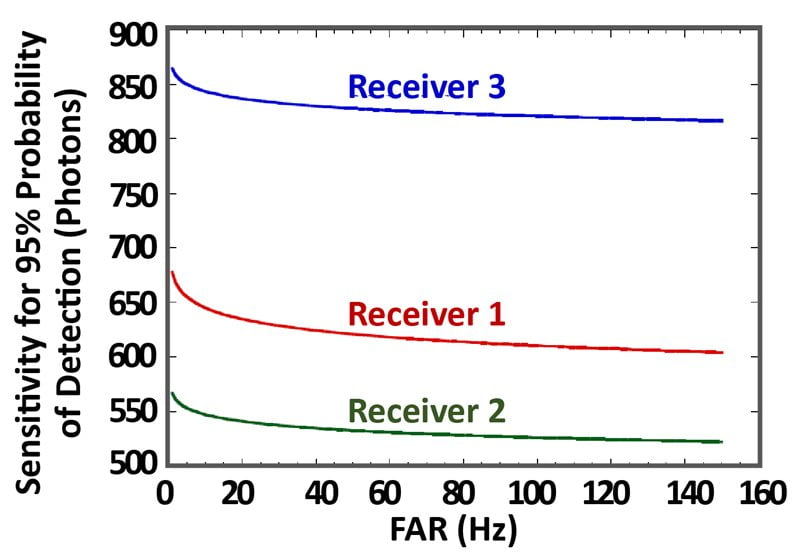
图4:表1中三个具有相同NEP的接收器的灵敏度与FAR的比较。灵敏度定义为脉冲探测概率为95%的光子信号水平。
结论
如本文所述,相同NEP的接收器在噪声的幅度分布方面可能存在很大差异,因此需要可靠地超过必须设置的消除假警报的检测阈值的输入信号电平。而不是优化暗电流、增益和过量噪声因子来最小化NEP,更好的做法是优化FAR的灵敏度和适合于应用的检测效率。