使用在短行程A1330应用程序
使用在短行程A1330应用程序
特雷福购买和威廉•威尔金森
亚博棋牌游戏快板微系统公司有限责任公司
文摘
本应用笔记是一个使用指南A1330角度传感器集成电路短行程旋转位置传感,包括磁铁的选择和方向的信息。它将概述的过程设置eepm寄存器所需A1330短行程的应用程序。亚博尊贵会员包括两个附录,说明了有效的短行程输出和功能,和一个描述如何使用短行程的配平片样品程序员GUI。
介绍
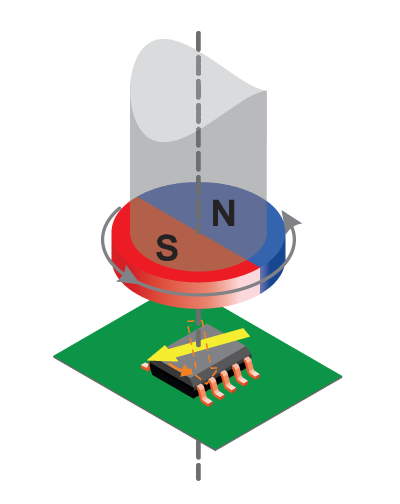
准确、低成本、和非接触转动位置传感通常是通过使用一个直径的冰球磁铁和磁传感器IC。磁铁与旋转物体和传感器集成电路定位这样的磁铁旋转平行的传感器IC包(参见图1)。短行程(或细角扩展)被定义为磁旋转角小于360°是由大规模集成电路的输出表示。实现全面输出子- 360°旋转允许用户使用整个ADC的动态范围。亚博尊贵会员应用程序
常适合短行程包括:
- 踏板位置
- 油箱液位传感
- 齿轮的位置
- 节流阀和/或阀位
- 致动器位置
阿莱格罗A1330磁角度传感器IC非常适合短行程转动位置传感,因为它提供了高级功能,如:
- 模拟/ PWM输出:这个可配置输出允许容易阅读和验证。
- 高和低角夹:可调输出饱和是高度可配置的。
- 用户可配置的增益和偏移量:实现全面输出没有输入的变化,获得和PREGAIN_OFFSET提供理想的解决方案。
- 最小和最大角检测方法:设置一个最小和最大角eepm可以提供诊断检查。它验证磁铁是在一个有效的操作位置。
基本系统配置
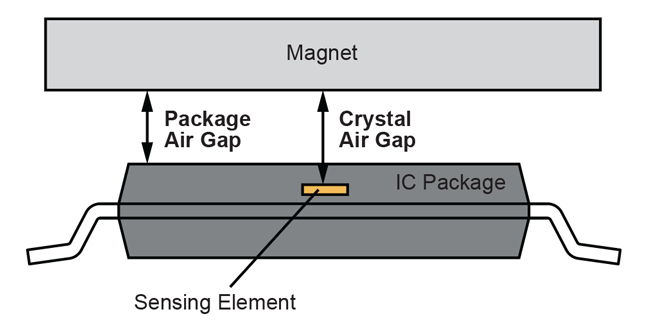
A1330可用在一个有TSSOP包,单个或堆叠dual-die(推荐系统需要冗余),和措施的角度磁场的平面方案。与磁铁安装包的正上方(如图2所示),可以使用两种不同的气隙定义:水晶气隙和包气隙。在本文的其余部分,包气隙是指气隙。CVH(圆形垂直大厅)直接坐落在中心的单一模包和两个CVHs(双模包中)是靠近中心为特定的测量(见数据表详细信息)。
设计为旋转感应磁系统
合适的磁铁尺寸和名义气隙角传感是一个关键组成部分。A1330能够感知磁场1200 G,这意味着更大的磁铁可以用来减少任何副作用,流浪字段可能在系统上。如果磁场强度高于1200克,在设备上不会发生破坏。操作A1330很大的磁场也会降低噪音,提高角精度,并增加有效分辨率的输出信号IC。对噪声性能的更多信息,请参阅本文档中发现后噪声部分。
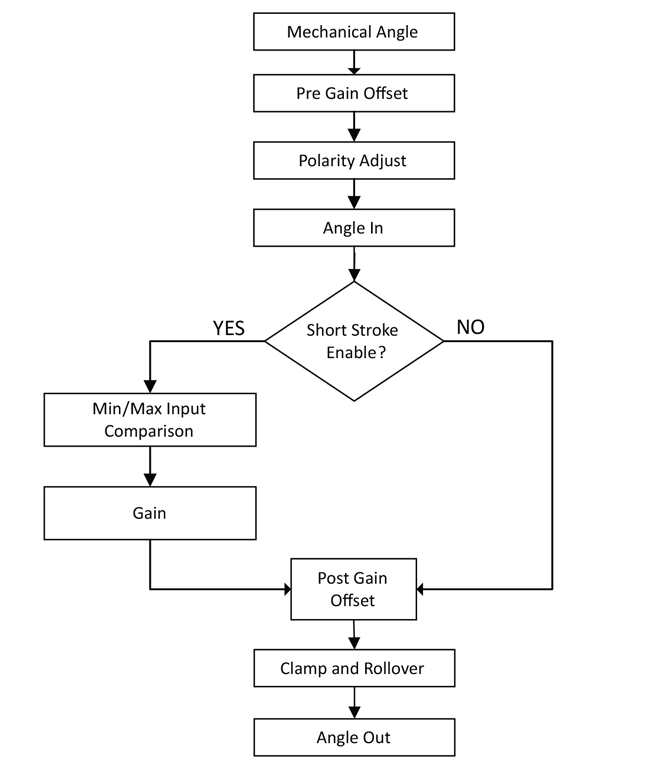
短行程和编程参数根据最终应用程序和系统需求,不同的参数可能会比其他人更重要。以下是可用的可编程设置短行程的应用程序。亚博尊贵会员必须启用短行程(SS)位调整增益和最小/ MAX_INPUT寄存器。
图3是一个简化版的短行程流程图和表1可用短行程eepm寄存器和位置。
表1:短行程寄存器
| 注册的名字 | 短手的名字 | 地址 | 位 |
| Pregain抵消 | PREGAIN_OFFSET | 0 x3a | 23:12 |
| 短行程使 | 党卫军 | 0 x3b | 25 |
| 获得 | 获得 | 0 x3b | 12:0 |
| 夹使 | CE | 0 x3c | 25 |
| 翻转使 | 罗伊 | 0 x3c | 24 |
| 最大输入 | MAX_INPUT | 0 x3c | 23:12 |
| 最低输入 | MIN_INPUT | 0 x3c | 11:0 |
| 极性调整 | 阿宝 | 0 x3d | 24 |
| Postgain抵消 | POSTGAIN_OFFSET | 0 x3d | 23:12 |
| 低夹 | LOW_CLAMP | 0 x3d | 11:0 |
| 高夹 | HIGH_CLAMP | 0 x3d | 5:0 |
PREGAIN_OFFSET
PREGAIN_OFFSET允许角是0,或者重新映射到磁铁的当前位置,之前获得的应用程序。通常这是第一个注册程序不管中风。PREGAIN_OFFSET是一个12位值(0 - 4095)位于eepm 0 x3b十三24位分辨率为0.088°/。
极性调整
极性调整(PO)集最后角的极性输出。当设置为“0”,基本上是机械角的角,绕过这一块。当设置为' 1 ',角是补充(见方程(1)。极性调整是一个位于eepm 0 x3d 24。建议设置PREGAIN_OFFSET之前设置极性调整。这是由于这样的事实:PREGAIN_OFFSET变化观察到的零角度。
方程1:极性调整
角= 360°-机械角
MIN_INPUT和MAX_INPUT
集成电路比较pregained角度值的边界设置通过MIN_INPUT和MAX_INPUT eepm字段。在事件之外的角度建立了边界,将三态输出显示一个错误引起的一个意想不到的角度值。对于这个功能正常工作,上拉或下拉电阻需要连接到输出。电阻器的方向取决于所需的ECU的配置。
启用这个特性是有用的应用程序,夹紧,否则面具过度的角位亚博尊贵会员移。最小/ MAX_INPUT 12位值位于eepm 0 x3c分辨率为0.088°/。
获得
增益调整设备的输出动态范围通过调整输出传递函数的斜率(mV /°)。获得应用数字化,能够扩大11.25°输入角度全面输出旋转(32×)。
应该注意在应用程序与高增益,前端的噪声将按比亚博尊贵会员例放大。在这种情况下,强烈建议使用角平均特性来减少噪音的影响(这是后来在本文档中)引用。增益是一个可值位于eepm 0 x3b比特0:12分辨率为0.0039×每一点额外的收益,即代码1 = 1.0039×的原始信号。
计算获得

POSTGAIN_OFFSET
POSTGAIN_OFFSET PREGAIN_OFFSET类似与一个小警告:它是用来抵消后的角度获得应用。这个寄存器的输出信号从0°的位置。如图4所示的图形描述和方程5计算。POSTGAIN_OFFSET常常被用作缓冲机械极端。POSTGAIN_OFFSET是一个12位值位于eepm 0 x3d位十一23 0.088°的与一项决议麽。
为了获得所需的延迟转移点,使用下面的方程5。图4是一个POSTGAIN_OFFSET函数的图形表示。
方程5:POSTGAIN_OFFSET
(所需的机械抵消从0°×增益值)——低_Clamp (°)
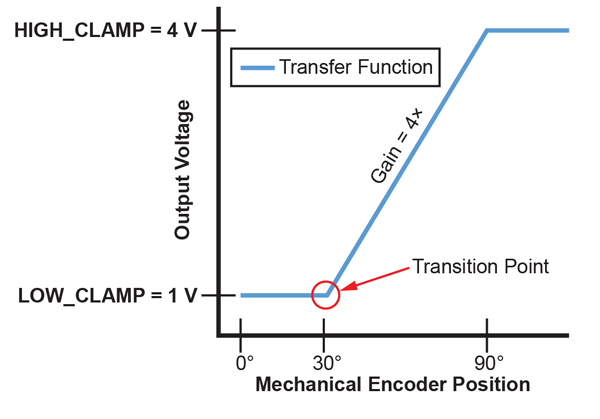
实现图4用方程5:
POSTGAIN抵消= (30°×4)- 60°
POSTGAIN抵消= 120°- 60°
POSTGAIN抵消= 60°
因此根据图4中,为了达到30°从零角度偏移,60°POSTGAIN_OFFSET还是需要的。
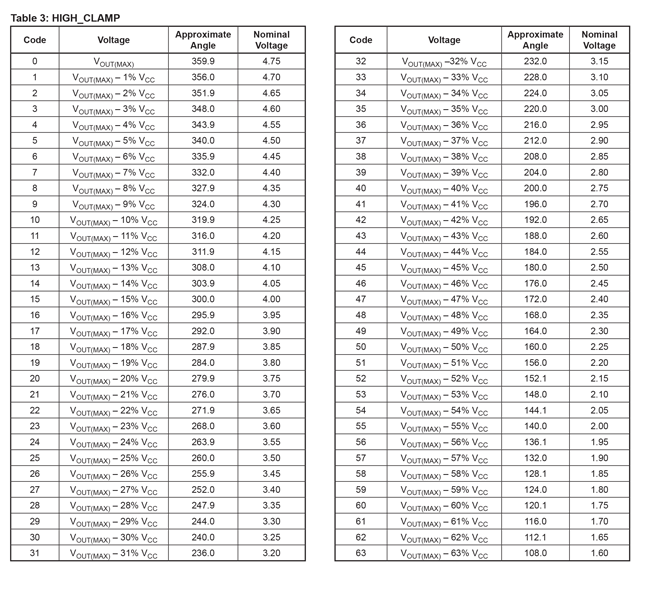
LOW_CLAMP和HIGH_CLAMP
LOW_CLAMP和HIGH_CLAMP指定最小和最大输出电压摆幅(或PWM占空比);默认情况下这些值设置为V的5%和95%CC。请参考表2和表3的适当的代码输出夹子。通常,低/ HIGH_CLAMP值是指在伏;然而,他们也可以想到的pregain(机械)的角度。LOW_CLAMP和HIGH_CLAMP 6-bit无符号值,位于位0:5 eepm 0 x3d (LOW_CLAMP)和6:11 (HIGH_CLAMP)。
夹启用和翻转启用
翻转使(ROE)是一个可编程设置,允许输出回到较低状态在达到高状态(反之亦然)。可以有或没有一个夹子。夹使钻头(CE)使高/ LOW_CLAMP调整和默认设置为VCC的5%和95%。翻转和夹使(CE)位位于eepm 0 x3c,分别位24和25。请参考表4的各种迭代夹子和翻转。图5和图6对比输出有或没有夹紧/翻转。
表4:夹紧和展期的选择
| CE | 罗伊 | 描述 |
| 0 | 0 | 正常的行为。 在标准模块360翻转。 |
| 0 | 1 | 在高、低夹输出翻转 值。 |
| 1 | 0 | 夹在第一次遇到高/输出 低卡的价值。 |
| 1 | 1 | 翻转发生在标准模块360。 输出高/低夹夹的价值。 |

图5:夹紧和没有翻转

图6:没有夹紧
翻转使
注意,在图6中,有高到低夹值比如图5所示;这是由于LOW_CLAMP HIGH_CLAMP。设置用于创建图5和图6是:
表5:夹紧设置
| 注册的名字 | 代码 | 价值 |
| PREGAIN_OFFSET | 0 | 0 |
| 获得 | 768年 | 4× |
| LOW_CLAMP | 10 | 40° |
| HIGH_CLAMP | 10 | 320° |
短行程的例子
编程在短行程A1330应用程序可以使用ASEK20完成。关于ASEK20的更多信息,请参阅快板A1330样本程序员用户手册。图7是本示例的输出配置。输出配置文件将低夹(1 V和0.5 V)直到20°发生旋转,然后每个模将以不同的速率斜坡(50 mV /°和25 mV /°)额外的60°,此时两个模具将高夹20°

图7:示例应用程序的输出
有两个方法程序A1330程序员使用样品。第一种方法是使用短行程调整选项卡(参见图8)。这种方法将在附录b,另一种方法是通过eepm选项卡。通过使用eepm选项卡中,寄存器在短行程调整选项卡可用。
图8:短行程选项卡
图7是一个常用的例子踏板位置输出。死2将50%的死1;这通常是对安全要求。微处理器将验证的角度阅读1除以死于死2。

A1330必须符合这些规范:
表6:eepm值

编程过程
1。程序员开始,设置零角度:
的。连接A1330 ASEK20(见图9),和ASEK20连接到你的电脑。

图9:A1330女儿卡插入一个ASEK20
b。开始样品A1330程序员软件和权力。与上面的磁铁A1330包,按上电(使用一个按钮右边的GUI)。读取输出要么按“读取输出”(位于右),“读一次”(位于左上角的GUI)或“开始读取”(位于左上角的GUI;这将调查的传感器甚至从eepm间隔)。

图10:A1330样本程序员演示选项卡
c。A1330重新映射到0°位置磁铁电流的角度位置,使用“零角”按钮位于窗口的左下角。这将调整PREGAIN_OFFSET寄存器值并重新分配0°到这个位置。
2。eepm编程:eepm选项卡包含所有用户可用的寄存器。下拉菜单附近左上角可以调整内存位置,所有字段,或短行程字段。选择短行程字段。
短行程字段:菜单上选择的短行程字段eepm选项卡包含寄存器短行程的应用程序的集合。亚博尊贵会员为了实现示例应用程序中,应用表7成eepm寄存器中的值。图11和图12 eepm中的实际值。

注意:PREGAIN_OFFSET值初始角从A1330读取之前任何获得或夹值。

图11:死1(全面)短行程
eepm设置

图12:死2(一半规模)短行程
eepm设置
3所示。验证输出:为了验证eepm设置是正确的,连接数字多用表(数字万用表)输出和扫描角度旋转。任何需要做出调整,应该通过改变POSTGAIN_OFFSET过渡点。POSTGAIN_OFFSET增益值是直接相关的,例如,为了得到1°机械换模1,大约4°POSTGAIN_OFFSET是必要的。
因此,这些POSTGAIN_OFFSET所需的值:
死1(全面)
POSTGAIN_OFFSET = (20°×4) - 40°= 40°
死2(一半规模)
POSTGAIN_OFFSET = (20°×2) - 20°= 20°
POSTGAIN_OFFSET常常被用作缓冲机械极端。
4所示。设置最小和最大输入:设置最小和最大输入限制系统作为警告用户的磁铁已经进入一个位置并不是为了旅行。这些值的最小和最大输入pregain值;因此,在这个例子中,适当的值可能是:
- MIN_INPUT = 10°
- MAX_INPUT = 90°
如果磁铁范围(即低于最低输入、10°以上最大输入,90°)的三态输出。一旦磁铁返回一个合适的角度,那么输出将恢复正常操作。
结果
磁铁的应用程序中使用的例子是一个8毫米(宽)×3毫米(厚度)N35镀镍稀土磁铁磁化通过直径;参见图13的磁铁的优势在不同的空气间隙。空气间隙测试1毫米和1.5毫米之间。
以下是结果和使用设置在前一节中收集的数据。

图13:在气隙磁场强度测量8毫米盘磁铁
角精度
确定的准确性A1330短行程需要一个理想情况。在这个应用程序中,图7中所示的曲线将会被认为是理想的,零错误输出曲线。为一个精确的比较,只考虑线性斜率(减去两个过渡点)。

图14:角编码器的位置精度
图14计算使用下面的方程9:
方程9:角误差
测量误差死1 =理想死1 - 1死去
测量误差死2 =理想死2 -模2
的名义敏感性A1330大约是12.5 mV /°;然而,由于每个模具都有不同的增益值,相应的敏感性的变化。死1,输出新的灵敏度是50 mV /°和死2输出灵敏度为25 mV /°。因此,为了在1°的角度误差,每个输出必须在50 mV和25 mV的理想输出,分别。
模具1输出的最大误差11 mV和halfscale输出最大误差的13个mV。因此,每个输出误差在1°,即0.22°错误死1和0.52°错误死2。
0

图15:噪音(1σ)和字段Strengthover温度(ANG_AVG = 0)
根据最终应用程序和速度传感器的输出需要取样,调整角度平均注册可以显著减少对集成电路的输出噪声(见表8和图16),以及增加整体场强观察到A1330(参见图16)。例如,在本文档中,一个ANG_AVE设置为000,每25μs意义数据刷新在集成电路的输出,并在8 - 10第三。对于大多数应用程序亚博尊贵会员,设置ANG_AVE = 4将绰绰有余,因为这将为用户提供一个足够快的刷新率,降低噪音。


图16:在各个领域和温度测量第三
结论
A1330磁场角度传感器集成电路工作在短行程应用程序,当一个人需要一个全面输出子- 360°磁铁旋转。亚博尊贵会员CVH-based角度传感器集成电路,特别是A1330,非常适合short-stroked应用程序,因为他们可以在低和高磁场。亚博尊贵会员小,产品有TSSOP PCB空间有限的应用程序包是伟大的。亚博尊贵会员内部平均A1330提供可调,决议允许交易的响应时间。以最小的组件需要外部传感器IC,任何短行程的A1330是一个低成本的解决方案的应用程序。
附录A
这个附录了一个额外的短行程A1330能完成配置。请注意这个配置是一个通用的迭代的实际产出。
配置一个

图17:输出的配置
配置是一种常见的输出节气门位置传感。当加在一起时,输出总是导致相同的值。这增加了冗余,通常所需的安全要求。检查内部的微处理器可以验证输出,并提醒用户如果有一个问题。
实现配置,遵循这些步骤:
- 连接ASEK20和使用A1330软件上发现的门户。
- 验证COM端口通信的软件。这可以被一个绿色栏右下角的软件窗口。如果酒吧是红色的,点击它,将出现一个新窗口。选择正确的COM端口,然后单击“OK”。
- 选择双模和模拟或PWM输出。权力在设备上通过点击“上电”位于右边的窗口。
- 磁铁的位置,选择“读取输出”。这将指示磁体目前阅读。选择“零点偏移”重新映射A1330的0°角阅读当前磁铁角位置。这将是显而易见的如果你读了eepm寄存器,特别是PREGAIN_OFFSET。
- 选择“eepm”选项卡。拉菜单中,选择“短行程字段”。这表明属于短行程的寄存器。
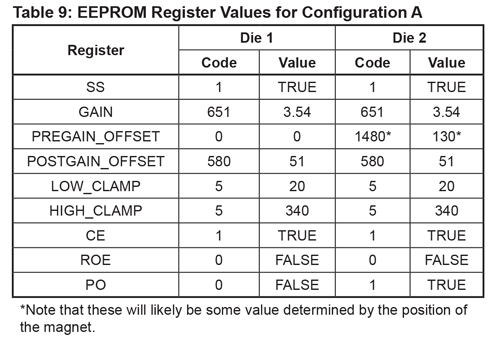
以下是创建配置所需要的寄存器和值(见表9的完整eepm寄存器值):
附录B
短行程的配平片是短行程的网关到A1330编程输出。本附录将强调的要点短行程调整选项卡(图18)。一些寄存器不可用在该选项卡中,即POSTGAIN_OFFSET,极性调整和最小/ MAX_INPUT。为了调整这些寄存器,请参考回主文档。

图18:短行程调整选项卡
编程A1330使用短行程调整选项卡
- 与快板A1330样本程序员开放、COM连接(一个绿色框右下角的窗口),设备驱动,和磁铁定位直接在设备上,导航到短行程配平片在左上角的窗口。有两个方法如何思考的输出,在度或伏。为目的的预排,输出单元将在伏特。这可以被调整输出单位旁边的下拉菜单。通过改变输出单位(从度和输入单位)伏,存储在位置1和位置2中的值会相应调整到正确的值(例如359°≈4.75 V)。
- 与输出单位改为伏,如图19所示的窗口。位于“修剪”框几个选项:
启动/停止读取
我。这个方法读取,实时,最小的和最大的磁铁旋转的角度值。这可以作为一个替代值输入位置。它会自动填充位置1和位置2的输入。
b。输入位置1和2
我。输入职位pregain价值度或伏旋转的磁铁。
1和2 c。想要的位置
我。想要的位置决定了系统的增益。
1和2 d。极限位置
我。这个调整HIGH_CLAMP LOW_CLAMP值。
e。限制行动——夹和/或展期
我激活夹紧,展期,或两者兼而有之。

图19:短行程配平片-输出单位伏特
3所示。与输出设置为所需的值(参见图20),选择“设备计算和程序”。这将设置适当的eepm寄存器所需的输出。

图20:调整值在短行程调整选项卡

图21:eepm设置
4所示。最后,为了验证输出是正确的验证框中选择“开始测试”。一个灰色线输入值和输出值就会出现。当磁铁旋转时灰色的线将在酒吧对增益值。通过移动到操作选项卡并选择“开始读取”,一个阴谋的电压对时间就会出现。这可以作为一个额外的验证所需的输出。